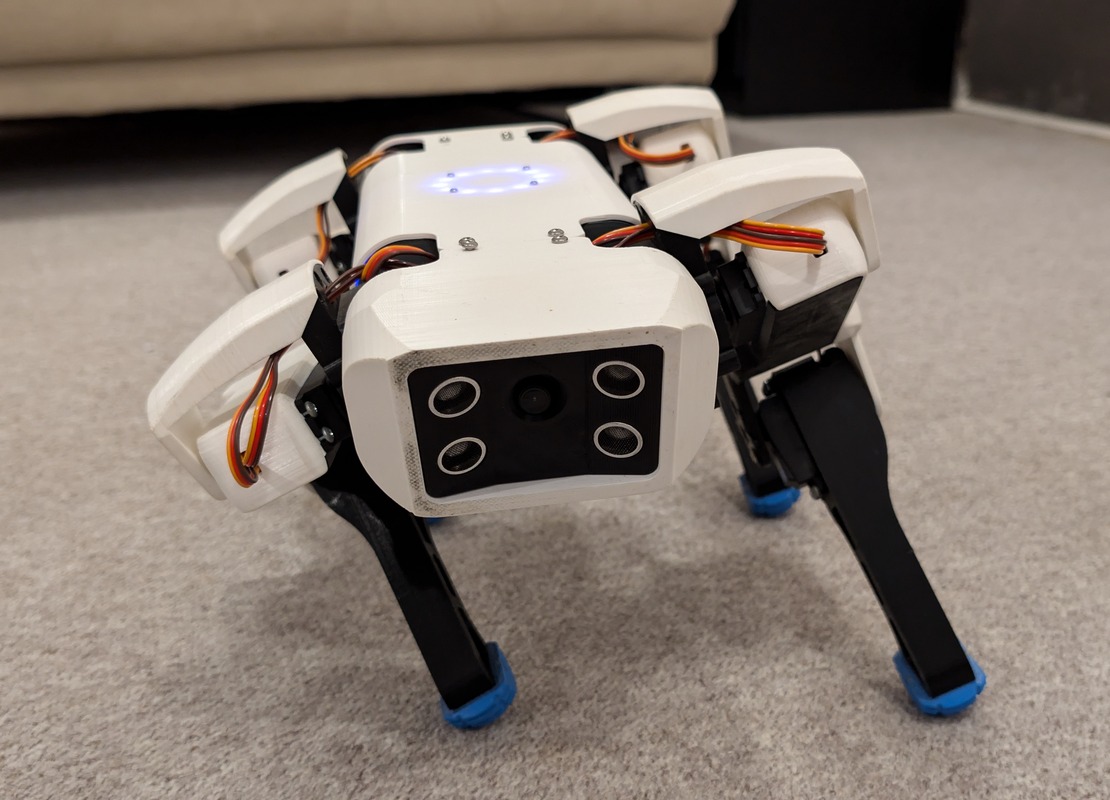
Spot Micro - Leika 🐕
A small quadruped robot, inspired by boston dynamic Spot.
Explore the docs »
[](https://github.com/runeharlyk/SpotMicroESP32-Leika/actions/workflows/frontend-tests.yml)
[](https://github.com/runeharlyk/SpotMicroESP32-Leika/actions/workflows/embedded-build.yml)
## 📜 Overview
Leika is a smaller quadruped robot for the Spot-Micro community.
Built on an ESP32 and powered by FreeRTOS, she can handle multiple tasks seamlessly - Like video and data streaming, solving kinematic and gait planning, controlling IO and much more.
By focusing on practicality and simplicity in both hardware and software, it offer an accessible platform for learning, experimentation, and modest real-world applications.
## 🎯 Features
- **Live Preview**: Instant feedback with real-time updates.
- **Real-Time Data**: Stream camera feeds, monitor sensors, and analyze data on the fly.
- **Kinematic Precision**: Full kinematic model for accurate movements.
- **Dual joystick controller**
- **Robot mirroring visualization**
- **Highly customizable**
- **Self-Hosted**: Complete autonomy, from code to execution.
### 🎮 Controller
 ### 🛠️ Documentation
You can find the current steps to get a fresh new doggo up and barking on [/docs](docs/readme.md)
1. [Components](docs/1_components.md)
1. [Assembly](docs/2_assembly.md)
1. [Software](docs/3_software.md)
1. [First-time setup](docs/4_configuring.md)
1. [Running](docs/5_running.md)
1. [Developing](docs/6_developing.md)
1. [Contributing](docs/7_contributing.md)
#### 🎮 Software
You can find a description for the current esp32 firmware and controller [here](docs/software_description.md).
## 🔮 Getting started
1. Clone and open the new project
```sh
git clone https://github.com/runeharlyk/SpotMicroESP32-Leika
```
1. Install dependencies with preferable package manager (npm, pnpm, yarn)
```sh
cd app
pnpm install
```
1. Configure device settings
1. Update `factory_settings.ini` with relevant settings
1. Upload filesystem image using platformIO
1. Upload firmware using platformIO
## 🚀 Future
See the [project backlog](https://github.com/users/runeharlyk/projects/3) and [open issues](https://github.com/runeharlyk/SpotMicroESP32-Leika/issues) for full list of proposed and active features (and known issues).
## 🙌 Credits
This project takes great inspiration from the following resources:
1. [Spot Micro Quadruped Project - mike4192](https://github.com/mike4192/spotMicro)
1. [Kinematics](https://www.researchgate.net/publication/320307716_Inverse_Kinematic_Analysis_Of_A_Quadruped_Robot)
1. [ESP32SvelteKit template](https://github.com/theelims/ESP32-sveltekit)
1. [SpotMicro ESP32 - Maarten Weyn](https://github.com/maartenweyn/SpotMicro_ESP32)
1. [SpotMicroAi](https://gitlab.com/public-open-source/spotmicroai)
1. [Spot Micro - Leika](https://github.com/runeharlyk/SpotMicro-Leika/tree/main)
1. [NightDriverStrip](https://github.com/PlummersSoftwareLLC/NightDriverStrip)
## ☕ Support
If you like the project and want to follow it evolving concidering ✨-ing the project
### 🛠️ Documentation
You can find the current steps to get a fresh new doggo up and barking on [/docs](docs/readme.md)
1. [Components](docs/1_components.md)
1. [Assembly](docs/2_assembly.md)
1. [Software](docs/3_software.md)
1. [First-time setup](docs/4_configuring.md)
1. [Running](docs/5_running.md)
1. [Developing](docs/6_developing.md)
1. [Contributing](docs/7_contributing.md)
#### 🎮 Software
You can find a description for the current esp32 firmware and controller [here](docs/software_description.md).
## 🔮 Getting started
1. Clone and open the new project
```sh
git clone https://github.com/runeharlyk/SpotMicroESP32-Leika
```
1. Install dependencies with preferable package manager (npm, pnpm, yarn)
```sh
cd app
pnpm install
```
1. Configure device settings
1. Update `factory_settings.ini` with relevant settings
1. Upload filesystem image using platformIO
1. Upload firmware using platformIO
## 🚀 Future
See the [project backlog](https://github.com/users/runeharlyk/projects/3) and [open issues](https://github.com/runeharlyk/SpotMicroESP32-Leika/issues) for full list of proposed and active features (and known issues).
## 🙌 Credits
This project takes great inspiration from the following resources:
1. [Spot Micro Quadruped Project - mike4192](https://github.com/mike4192/spotMicro)
1. [Kinematics](https://www.researchgate.net/publication/320307716_Inverse_Kinematic_Analysis_Of_A_Quadruped_Robot)
1. [ESP32SvelteKit template](https://github.com/theelims/ESP32-sveltekit)
1. [SpotMicro ESP32 - Maarten Weyn](https://github.com/maartenweyn/SpotMicro_ESP32)
1. [SpotMicroAi](https://gitlab.com/public-open-source/spotmicroai)
1. [Spot Micro - Leika](https://github.com/runeharlyk/SpotMicro-Leika/tree/main)
1. [NightDriverStrip](https://github.com/PlummersSoftwareLLC/NightDriverStrip)
## ☕ Support
If you like the project and want to follow it evolving concidering ✨-ing the project
 ## You may also like...
- [Spot Micro Quadruped Project - mike4192](https://github.com/mike4192/spotMicro) - Great ROS based project
- [SpotMicroAi](https://gitlab.com/public-open-source/spotmicroai) - Group repository with simulations and runtimes
## 📃 License
[MIT](LICENSE.md)
---
> [runeharlyk.dk](https://runeharlyk.dk) ·
> GitHub [@runeharlyk](https://github.com/runeharlyk) ·
> LinkedIn [@Rune Harlyk](https://www.linkedin.com/in/rune-harlyk/)
## You may also like...
- [Spot Micro Quadruped Project - mike4192](https://github.com/mike4192/spotMicro) - Great ROS based project
- [SpotMicroAi](https://gitlab.com/public-open-source/spotmicroai) - Group repository with simulations and runtimes
## 📃 License
[MIT](LICENSE.md)
---
> [runeharlyk.dk](https://runeharlyk.dk) ·
> GitHub [@runeharlyk](https://github.com/runeharlyk) ·
> LinkedIn [@Rune Harlyk](https://www.linkedin.com/in/rune-harlyk/)